Data-driven output regulation for MIMO systems
A data-only controller can cancel exosignal effects in MIMO linear systems without knowing the model.
A data-only controller can cancel exosignal effects in MIMO linear systems without knowing the model.
- Research org: Unspecified in arXiv abstract
- Core data: No benchmark numbers in abstract
- Breakthrough: Semidefinite-program controller design on an auxiliary system
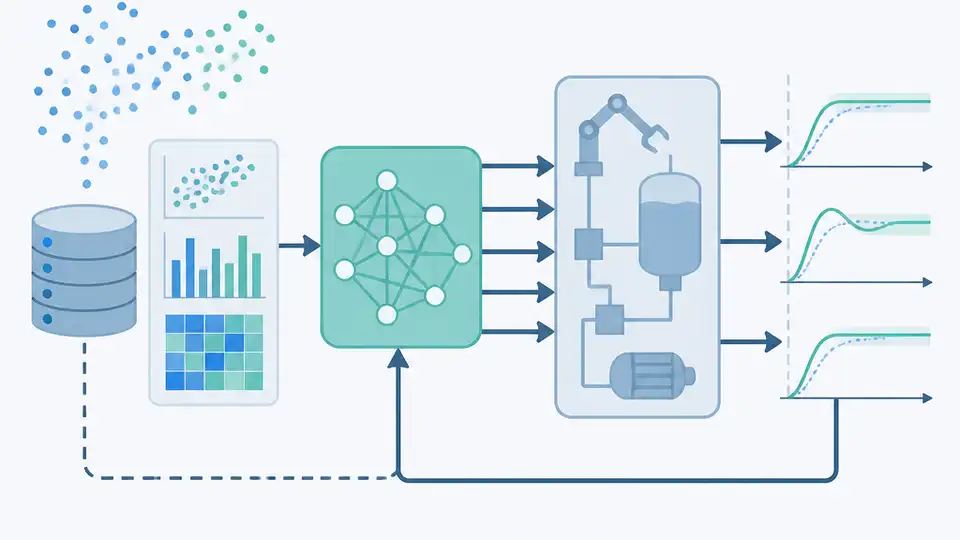
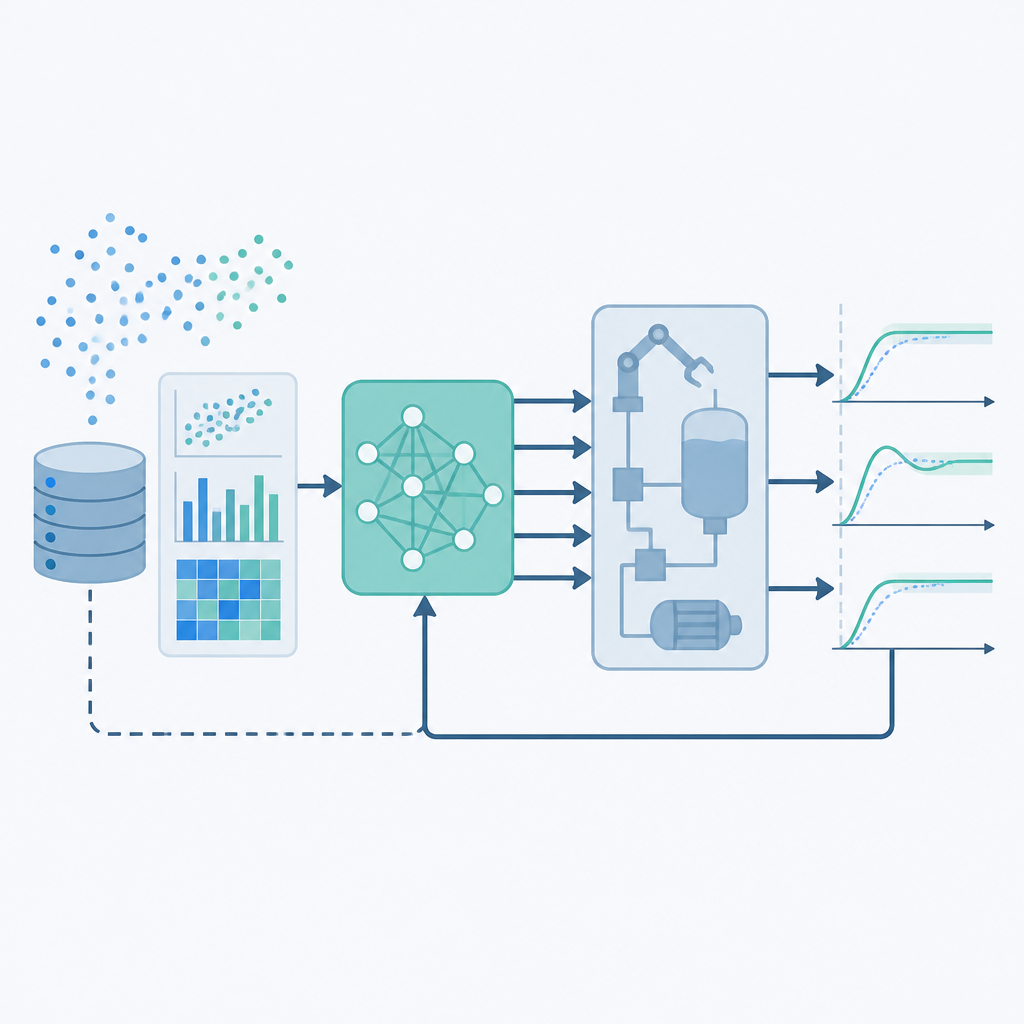
Output regulation via input-output data is about doing classic control tasks without the usual prerequisite: a full system model. The paper looks at a multi-input-multi-output discrete-time linear system, collects noisy input-output data, and then designs a feedback controller that makes the effect of an unknown exosignal disappear from the output.
For engineers, the appeal is straightforward. In real systems, you often have logs, telemetry, and experiments before you have a clean mathematical model. This paper asks whether those data are enough to solve output regulation directly. The answer, according to the abstract, is yes for this MIMO linear setting, and the controller can be computed as an optimization problem rather than by identifying the whole plant first.
What problem this paper is trying to fix
Get the latest AI news in your inbox
Weekly picks of model releases, tools, and deep dives — no spam, unsubscribe anytime.
No spam. Unsubscribe at any time.
Output regulation is the control problem of making a system’s output track a desired behavior or reject a disturbance. Here, the disturbance is described as an unknown exosignal, and the goal is to asymptotically annihilate its effect on the output. That is a classic control objective, but the paper’s twist is that it does not assume knowledge of the system model.
That matters because model identification is often the slowest, most fragile part of control design. If you can work from input-output data directly, you may be able to build a controller even when the underlying dynamics are only partially known or hard to derive. The abstract frames this as solving output regulation purely from input-output data for MIMO linear systems.
How the method works in plain English
The paper does not describe a full algorithm in the abstract, but it does reveal the key shape of the method. First, the authors collect input-output data from the system, and those data are affected by noise and by the unknown exosignal. Then they design a feedback controller without using the system model.
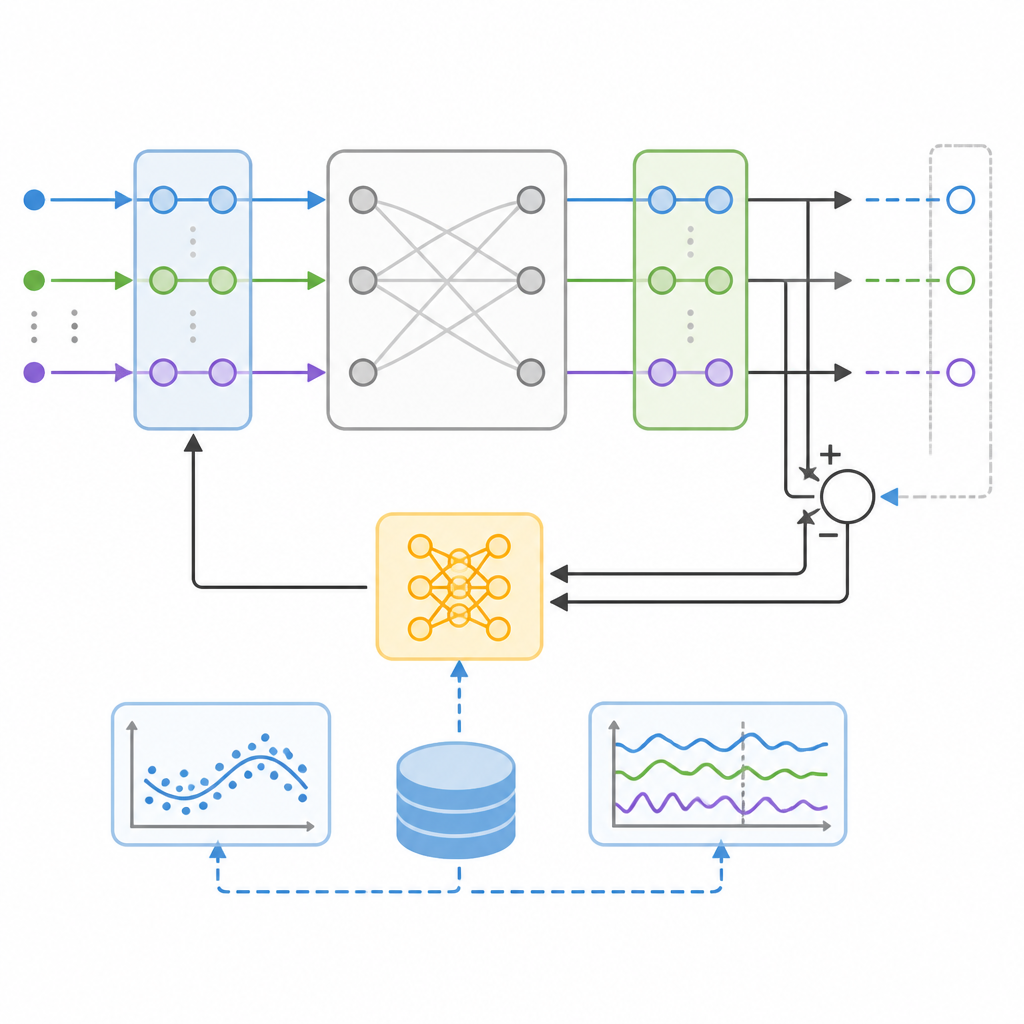
The controller design is formulated as a semidefinite program. In practical terms, that means the control synthesis is turned into a convex optimization problem, which is attractive because convex programs are usually much easier to solve reliably than general nonconvex design problems. The abstract also says the design is pursued on a suitable auxiliary system.
That auxiliary system is important. The paper does not simply claim that you can optimize directly on the original plant. Instead, it constructs a related system where the controller can be designed, and then carries the result back to the original system. The bridge between the two is justified by a rigorous examination of how the solutions relate.
What the paper actually shows
The strongest claim in the abstract is conceptual rather than numerical: the authors show that output regulation can be solved from input-output data alone for MIMO discrete-time linear systems. The controller asymptotically removes the exosignal’s effect on the output, and the method does not require prior knowledge of the plant model.
What the abstract does not give is just as important for readers looking for a quick engineering judgment. It does not include benchmark numbers, runtime comparisons, dataset sizes, or a case study summary. So there is no evidence here about how the approach performs against model-based baselines, how sensitive it is to noise in practice, or how large the semidefinite program becomes as system size grows.
Still, the structure of the result is useful. If the method scales, it could give control engineers a way to design regulation controllers from logged behavior rather than from first-principles identification. That is especially relevant in settings where the exosignal is unknown or where building an accurate model is expensive.
Why developers and control engineers should care
For developers working with control stacks, this paper sits at the intersection of system identification, optimization, and robust feedback. It suggests a workflow where data are not just used to estimate a model, but directly to synthesize the controller. That can simplify pipelines when model fitting is a bottleneck.
It also reinforces a broader trend in modern control: replacing hand-built analytic derivations with optimization-based synthesis. If the semidefinite program is practical, then the method could fit nicely into toolchains that already solve convex problems. The abstract does not say which solver or implementation details were used, so that part remains open.
There are also clear limitations to keep in mind. The paper is about discrete-time linear MIMO systems, so the abstract does not justify extending the method to nonlinear, continuous-time, or single-input-single-output systems. It also does not claim robustness guarantees beyond the fact that the collected data are noisy. Those gaps matter if you are thinking about deployment.
What is new here, and what remains open
The technical novelty is not a new disturbance model or a new physical application. It is the way the regulation problem is recast: from raw input-output data, via an auxiliary system, into a semidefinite program whose solution transfers back to the original plant. That is a neat control-theoretic bridge, and it is the core contribution described in the abstract.
What remains to be learned from the full paper is how much data are needed, how the noise affects feasibility, and how the auxiliary system is chosen in practice. Those are the questions engineers will care about before trusting the method on a real plant. The abstract establishes the idea, but not the full operational envelope.
- The paper targets output regulation without a known plant model.
- The controller is synthesized as a semidefinite program on an auxiliary system.
- The abstract gives no benchmark results, so practical performance is still unclear.
In short, this is a data-driven control result for people who want regulation behavior without a full identification step. If the full paper backs up the abstract’s claim with workable numerics, it could be a useful pattern for model-light control design in MIMO systems.
// Related Articles
- [RSCH]
CRDTs keep replicas in sync without locks
- [RSCH]
Post-Deterministic Systems for Autonomous Infra
- [RSCH]
Causal methods for measuring task learnability
- [RSCH]
RL Training That Hands Off Control Gradually
- [RSCH]
OmniGameArena benchmarks VLM game agents better
- [RSCH]
TurboQuant cuts KV cache memory 6x in Google tests