KLIP spots localized shift in inverse problems
KLIP uses KL divergence between diffusion priors and posteriors to detect and localize OOD shifts in inverse problems.
KLIP uses KL divergence between diffusion priors and posteriors to detect and localize OOD shifts in inverse problems.
- Research org: Unspecified in arXiv abstract
- Core data: No benchmark numbers in abstract
- Breakthrough: KL-divergence between diffusion prior and posterior for OOD localization
Inverse problems are where you infer an image or signal from indirect measurements, which is exactly where a lot of real systems live: computational imaging, medical reconstruction, and other settings where you never observe the clean input directly. That makes out-of-distribution detection harder than in standard image classification, because the model has to reason from measurements, not full images.
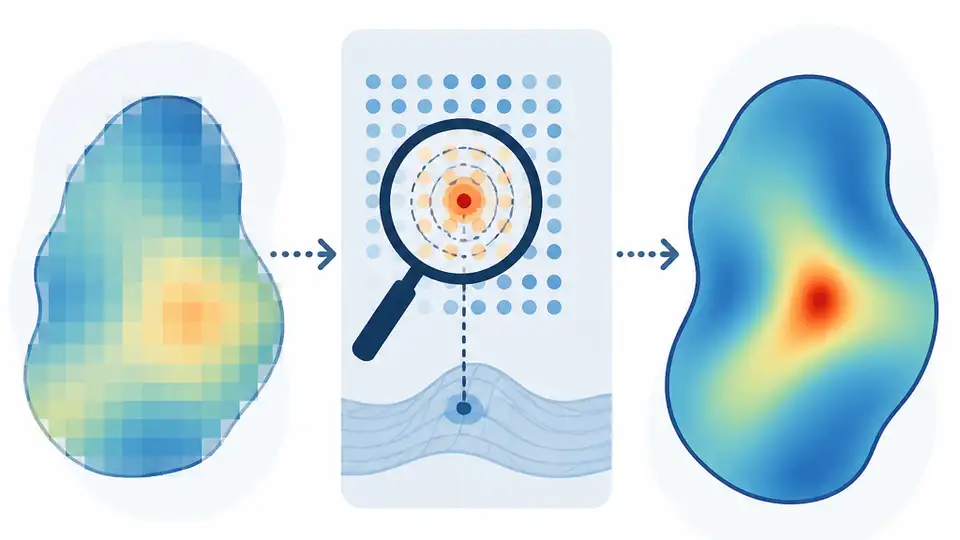
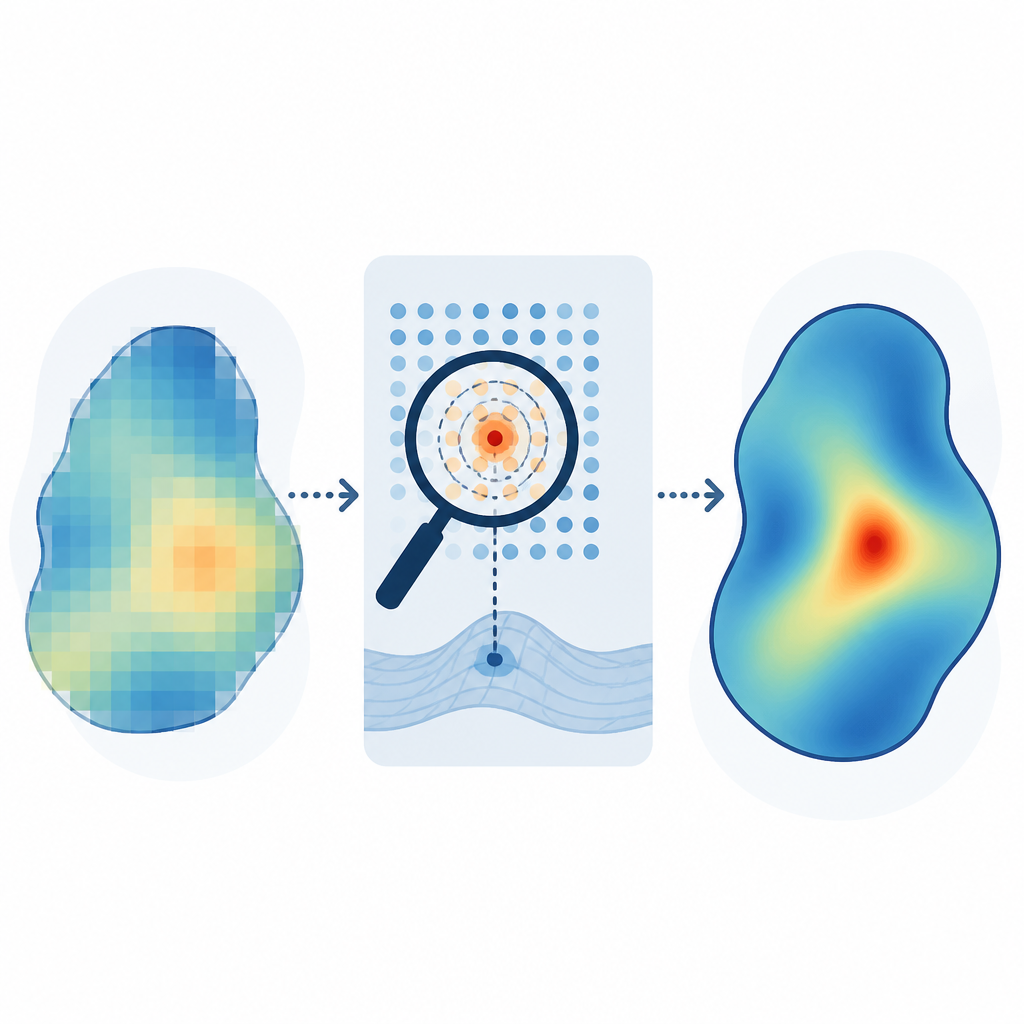
KLIP is trying to close that gap. Instead of asking whether a reconstructed image looks unusual after the fact, it compares the diffusion prior and the posterior during inference, then uses that KL-divergence signal to flag both whole-image shifts and localized patches that may be out of distribution.
What problem this paper is trying to fix
Get the latest AI news in your inbox
Weekly picks of model releases, tools, and deep dives — no spam, unsubscribe anytime.
No spam. Unsubscribe at any time.
Most existing OOD detection methods assume you can inspect full images and often need some knowledge of the shifted distribution. That is a weak fit for inverse problems, where the input is usually an indirect measurement and the failure mode may be subtle. A reconstruction can look broadly plausible while still containing a small region that is semantically wrong.
The abstract calls out two specific gaps. First, prior methods often require calibration data or some idea of what the shifted distribution looks like. Second, they struggle with subtle or localized distribution shifts, which are common in real data. If you are building an imaging pipeline, that matters because a detector that only catches obvious global changes can miss the exact kind of anomaly you care about.
There is also a practical mismatch in granularity. A lot of OOD detectors are designed around full images, but inverse problems are often patchy and spatially structured. In medical imaging, for example, a small tumor may be the entire reason a sample is out of distribution relative to healthy scans. KLIP is designed to surface that kind of localized difference instead of collapsing everything into one global score.
How the method works in plain English
The core idea is straightforward: use the diffusion model as a prior, infer the posterior from the measurements, and measure how far apart those two distributions are with KL divergence. If the posterior has to move a lot away from what the prior expects, that can be treated as a signal that the sample is unusual.
That is a nice fit for diffusion models because they already encode a learned data distribution. KLIP turns that modeling strength into a detection signal. Rather than bolting on a separate classifier or depending on examples from the shifted domain, the method tries to read anomaly information directly from the gap between what the prior believes and what the measurements force the posterior to believe.
The paper also claims this can be localized. That means the divergence is not just treated as a single image-level score. It can be used to identify OOD patches within an image, which is the part that makes the method more useful for real inverse problems. Engineers care about that because a detector that can point to the suspicious region is easier to debug, validate, and operationalize.
One important detail: the abstract does not spell out the full implementation mechanics, so there is no reason to assume a particular estimator, thresholding strategy, or patch aggregation scheme beyond what is explicitly stated. What is clear is the conceptual move from global OOD scoring to KL-based comparison between diffusion prior and posterior in the inverse-problem setting.
What the paper actually shows
The abstract reports that KLIP can detect subtle yet semantically meaningful shifts. The concrete example given is a shift from healthy liver CT scans to scans with tumors. That is a strong signal that the method is not just catching obvious corruption or gross dataset mismatch; it is sensitive to medically relevant deviations.
The paper also says the approach generalizes across different diffusion models, datasets, and inverse problems. That matters because a lot of anomaly-detection ideas look good in one setup and then fall apart when the reconstruction model or measurement process changes. Generalization across those axes is one of the few claims in the abstract that suggests broader practical value.
What the abstract does not provide is equally important: no benchmark table, no accuracy numbers, no AUROC, no localization metric, and no runtime or compute cost. So while the direction is promising, the source text does not let us quantify how much better KLIP is than prior methods.
That means the strongest honest read is this: the paper proposes a principled detection metric, shows qualitative and task-level evidence that it can catch subtle shifts, and claims cross-setting generality. It does not, in the abstract at least, give the numerical evidence you would want before deciding on production adoption.
Why developers should care
If you build systems around reconstruction, denoising, or other inverse problems, OOD detection is not a nice-to-have. A model can produce a plausible output while quietly hallucinating or missing a localized anomaly. A method like KLIP is interesting because it tries to make the prior/posterior mismatch itself the warning signal.
That is especially relevant in workflows where you cannot assume access to labeled anomalies or examples from the target shift. The abstract explicitly says KLIP does not require calibration data or knowledge of the shifted distribution. For teams operating in messy real-world environments, that lowers the barrier to adding a detection layer.
It is also a reminder that diffusion models are not just generators or reconstructors. In this paper, they are being used as probabilistic structure that can support uncertainty-aware detection. That is a useful pattern for engineers: if your model already defines a prior over valid data, there may be a way to turn that into a monitoring or safety signal.
Limitations and open questions
The abstract leaves several questions unanswered. It does not say how sensitive the method is to threshold choice, how it behaves under severe noise, or how stable the localization is across different measurement operators. Those details matter a lot in inverse problems, where the measurement process can dominate the posterior.
There is also no numerical comparison in the abstract, so it is hard to judge the size of the gain over existing OOD detectors. The claim that it generalizes across diffusion models, datasets, and inverse problems is encouraging, but the practical meaning of that generalization depends on the actual experiments.
Finally, “localized distribution shift detection” is a powerful idea, but it raises implementation questions. How small a patch can KLIP detect? How does it behave when the anomaly is diffuse rather than compact? Can it separate a true OOD region from a hard-but-in-distribution region? The abstract does not answer those, so they remain the right questions to ask when reading the full paper.
Bottom line
KLIP proposes a clean way to reuse diffusion priors for more than reconstruction: it compares prior and posterior distributions to detect out-of-distribution samples, including localized anomalies, in inverse problems.
For engineers, the appeal is obvious. It does not rely on shifted-domain calibration data, it targets the measurement space rather than only full images, and it is meant to work across multiple diffusion and inverse-problem settings. The missing piece is hard numbers, which the abstract does not provide.
If you are building imaging systems where subtle anomalies matter, this is the kind of method worth watching: not because it promises magic, but because it reframes anomaly detection around the probabilistic structure your model already has.
// Related Articles
- [RSCH]
CRDTs keep replicas in sync without locks
- [RSCH]
Post-Deterministic Systems for Autonomous Infra
- [RSCH]
Causal methods for measuring task learnability
- [RSCH]
RL Training That Hands Off Control Gradually
- [RSCH]
OmniGameArena benchmarks VLM game agents better
- [RSCH]
TurboQuant cuts KV cache memory 6x in Google tests