KLIP 用擴散先驗抓局部異常
KLIP 把擴散先驗和後驗的 KL 散度拿來看逆問題中的 OOD 變化,還能把異常定位到局部區域。
KLIP 把擴散先驗和後驗的 KL 散度拿來看逆問題中的 OOD 變化,還能把異常定位到局部區域。
- 研究機構:arXiv 摘要未明確標註
- 核心數據:摘要無公開 benchmark 數字
- 突破點:KL 散度做局部偵測
逆問題很常出現在真實系統裡。你不是直接看到乾淨影像或訊號,而是只拿到間接量測,再反推回去。這類場景包含計算攝影、醫療重建等。問題是,當輸入本來就不是完整資料時,OOD 偵測會比一般影像分類更難。模型可能重建出一張看起來合理的圖,但裡面其實藏著局部異常。
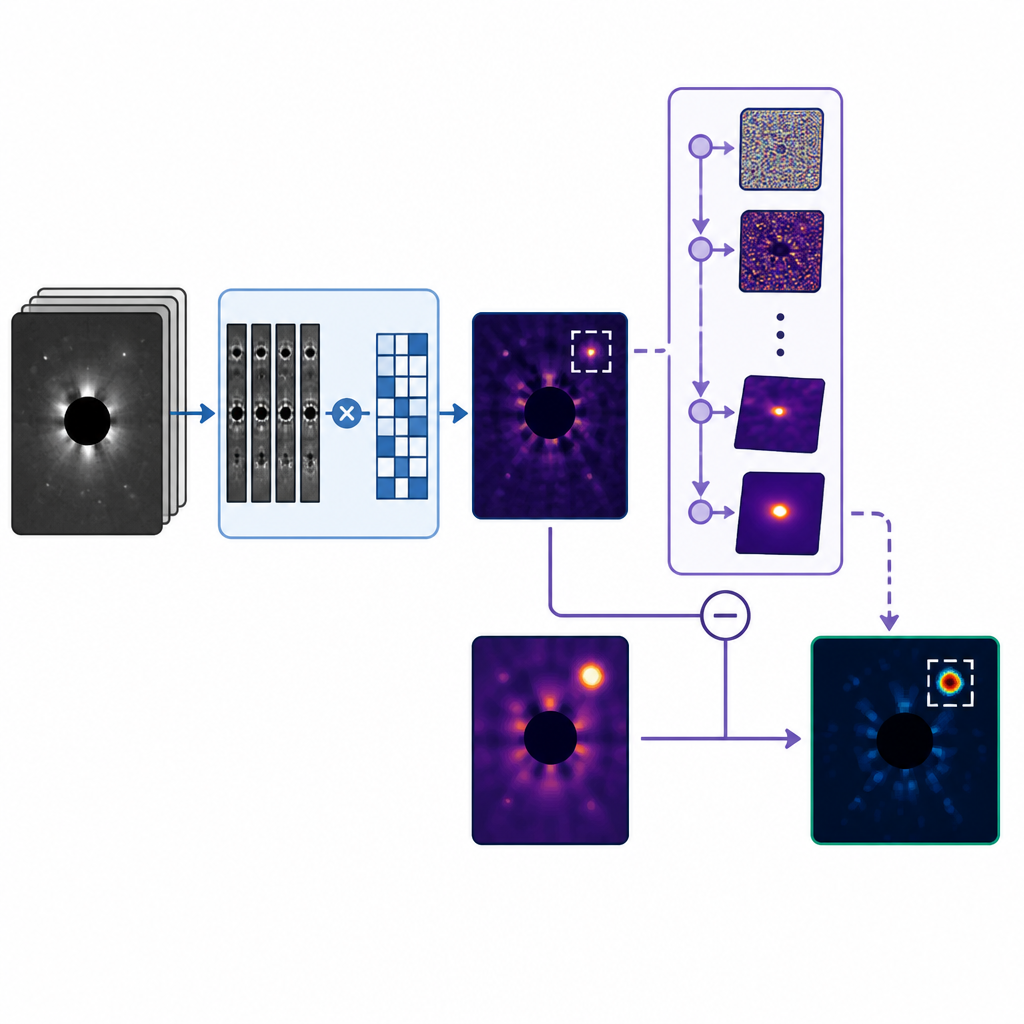
KLIP 想處理的就是這個痛點。它不是事後去看重建結果像不像怪圖,而是在推理過程中,直接比較 diffusion prior 和 posterior 的差距,再把這個 KL divergence 當成訊號,去判斷整張圖或局部區塊是不是偏離分佈。
這篇在補哪個洞
訂閱 AI 趨勢週報
每週精選模型發布、工具應用與深度分析,直送信箱。不定期,不騷擾。
不會寄垃圾信,隨時可取消。
摘要點出兩個老問題。第一,很多既有 OOD 偵測方法都假設你能直接看完整影像,甚至還需要知道偏移後的分佈長什麼樣。這對逆問題很不友善,因為輸入通常是量測值,不是完整圖片。
第二,既有方法對「細微、局部」的分佈偏移不夠敏感。這在真實資料裡很常見。你不一定會遇到整張圖都壞掉的情況,更多時候是某個小區域出現語意上不對的內容。若偵測器只能抓大範圍異常,就會錯過真正重要的訊號。
這也是為什麼這篇論文看起來不是在做一般分類式 OOD,而是在做更貼近工程現場的版本。逆問題裡的異常,常常是空間上分散、局部化、而且跟重建流程綁在一起。KLIP 的設計方向,就是把這種局部差異拉出來看。
KLIP 的方法怎麼運作
核心想法其實很直白:把 diffusion model 當成先驗,根據量測推得後驗,再看兩者差多遠。差距用 KL divergence 來量。如果後驗被量測推得離先驗預期很遠,那就可能代表這筆樣本不太正常。
這個做法的重點在於,它不是額外訓練一個分類器,也不是依賴來自偏移分佈的例子。它是直接讀取擴散模型本身的機率結構。換句話說,模型原本就知道「正常資料大概長什麼樣」,KLIP 只是把這個知識轉成偵測訊號。
更關鍵的是,摘要強調這個訊號可以被用來定位。也就是說,KL divergence 不只是一個整體分數,還能指出影像裡哪些 patch 可能是 OOD。對開發者來說,這很實際。你不只知道有問題,還知道問題大概在哪裡,方便除錯、驗證,或接到後續流程。
不過,摘要沒有交代完整實作細節,所以不能自行腦補它怎麼估計 posterior、怎麼切 patch、怎麼設閾值。能確定的是,它把「prior vs posterior 的差」這件事,直接搬到逆問題的 OOD 偵測上,而且還想做到局部化。
論文實際證明了什麼
摘要說,KLIP 可以偵測到細微但有語意意義的偏移。它舉的例子是從健康的 liver CT,轉到帶有 tumor 的 CT。這代表它不是只在抓明顯雜訊、壓縮失真,或整體資料集錯位,而是能碰到臨床上有意義的變化。
摘要也說,這個方法可以跨不同 diffusion model、dataset 和 inverse problem 泛化。這一點很重要。很多偵測方法在單一設定裡看起來不錯,一換重建模型或量測方式就失效。若真的能跨這些條件維持表現,實用價值會高很多。
但摘要沒有公開完整 benchmark 數字。沒有 accuracy、沒有 AUROC、沒有 localization metric,也沒有 runtime 或計算成本。也就是說,從這份 raw 資料裡,我們只能確認它提出了方法、展示了能抓到細微偏移的結果,並主張有跨設定泛化能力;但無法量化它比既有方法強多少。
所以比較公平的結論是:這篇論文提供了一個有理論感的偵測指標,也給出能抓到醫療場景局部異常的證據。只是摘要層級還不足以支持你直接判定它已經贏過所有 baseline。
對開發者有什麼影響
如果你在做重建、去噪、或其他逆問題系統,OOD 偵測不是加分題,而是安全題。模型可能產出一張看似合理的圖,卻在某個局部區域悄悄 hallucinate,或漏掉異常。KLIP 有趣的地方在於,它把 prior/posterior mismatch 本身變成警報。
這對沒有標註異常、也沒有偏移分佈樣本的團隊特別有吸引力。摘要明確說,KLIP 不需要 calibration data,也不需要知道 shifted distribution 長什麼樣。對真實環境裡常見的資料混雜、分佈不穩定情境,這等於少了一層部署門檻。
它也提醒一件事:diffusion model 不只是生成器或重建器。這篇把它當成 probabilistic structure 來用,進一步提供不確定性相關的偵測訊號。對工程實作來說,這是個值得記住的模式:如果模型本來就學到資料先驗,也許就能順便拿來做監控或安全檢查。
限制與還沒回答的問題
摘要沒有講清楚幾個很實際的問題。像是閾值怎麼設、在高雜訊下穩不穩、不同 measurement operator 下的定位是否一致,這些都沒交代。可是在逆問題裡,量測流程本身就會強烈影響 posterior,所以這些細節其實很關鍵。
另外,因為沒有數字比較,我們也很難判斷它相對於既有 OOD 偵測器到底提升多少。摘要說它能跨 diffusion model、dataset、inverse problem 泛化,這當然是好消息,但真正的實際意義還得看完整實驗。
還有一個問題是「局部化」到底有多細。它能抓多小的 patch?如果異常不是集中在一塊,而是分散、模糊、或和正常訊號糾纏在一起,KLIP 還能不能穩定標出來?摘要沒有回答。這些都會是讀全文時該追的重點。
結論
KLIP 的重點,不是再做一個新的重建模型,而是把 diffusion prior 和 posterior 的差距拿來當 OOD 偵測器,而且還想做到局部異常定位。
對開發者來說,它的吸引力很直接:不靠偏移資料、不只看整張圖、而且針對逆問題這種真實又麻煩的場景。缺點也同樣明顯:摘要沒有公開完整 benchmark 數字,所以現在還不能把它當成已經被數據完全證明的方案。
如果你正在做醫療影像、計算攝影、或任何需要從間接量測重建結果的系統,這篇值得記住。它不是在喊口號,而是在提醒你:模型本來就學到的機率先驗,也可以變成異常偵測的入口。