RL 先接管再放手
這篇論文證明,RL 可以先借用可用的基線策略,再把控制權逐步交給學到的新策略。
這篇論文證明,RL 可以先借用可用的基線策略,再把控制權逐步交給學到的新策略。
- 研究機構:arXiv 摘要未明確標註
- 核心數據:摘要無公開 benchmark 數字
- 突破點:基線與學習策略仲裁
這篇論文處理的是一個很實際的 RL 痛點:不是模型不夠強,而是從零開始訓練太不穩。作者的想法很直接,如果你手上已經有一個能用的 policy,就不要把它整個丟掉,反而可以把它當成訓練的一部分,先保住表現,再慢慢把控制權交出去。
這不是單純的 warm start。它的重點在於訓練過程中有一個仲裁機制,會在基線策略和可訓練策略之間切換。早期靠基線撐住局面,後期再把主導權移給新學到的 policy,最後讓新模型脫離基線獨立運作。
這篇在解什麼問題
訂閱 AI 趨勢週報
每週精選模型發布、工具應用與深度分析,直送信箱。不定期,不騷擾。
不會寄垃圾信,隨時可取消。
傳統 RL 很常從隨機 policy 開始,然後靠 reward 一點一點摸索。但在控制問題裡,這種做法常常太浪費。因為環境可能很脆弱,探索成本高,訓練還沒學到東西就先把系統搞亂。

作者鎖定的是另一種更常見的情境:你其實已經有一個可運作的控制器、heuristic,或舊模型。它不一定夠好,但至少能把 agent 帶到目標集合,甚至高機率維持在那裡。論文把這種 policy 稱為 functional baseline,也就是「能用,但還不夠好」。
這個切入點很有工程味。很多團隊不是沒有起點,而是有一個還行的起點,不知道怎麼安全地把它升級。這篇論文就是在回答這件事。
方法怎麼運作
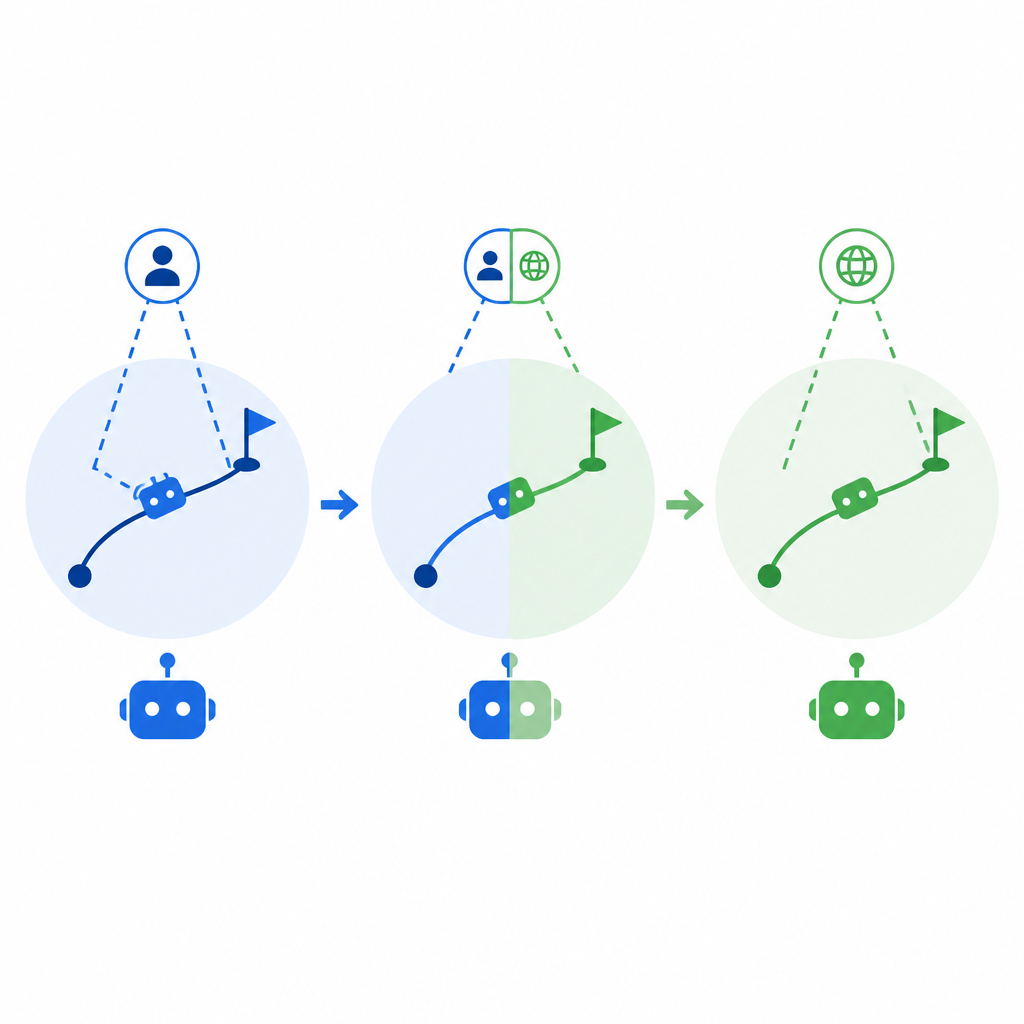
核心概念是 arbitration,也就是仲裁。系統在每個步驟都要決定,現在是讓 baseline 出手,還是讓學習中的 policy 接手。早期訓練時,baseline 承擔大部分控制;隨著訓練進展,控制權逐步轉移到 learned policy。
這種設計的重點,不只是「讓模型看過好示範」,而是讓學習過程本身建立在比較穩的狀態上。因為 baseline 本來就能把 agent 留在 goal set 裡,學習 policy 就不必先從最基本的生存行為開始亂試,訓練會比較不脆弱。
論文標題裡的 agency-transferring,講的就是這個過程:不是直接複製一個舊策略,而是把舊策略當 scaffold,讓新策略在它的保護下逐步長出能力。等訓練完成後,baseline 會被完全移除,最後留下的是一個可以單獨運作的神經網路。
這個方法的直覺很像接班。不是叫新人一開始就全權負責,而是先讓舊人帶著做,等穩了再交棒。對 RL 來說,這樣可以把探索風險壓低,也比較不容易在訓練前期就把表現打爛。
論文實際證明了什麼
摘要裡的證據分成理論和實驗兩塊。理論上,作者形式化定義了 functional baseline,並在給定假設下分析訓練行為。更重要的是,他們把分析延伸到最後的 baseline-free 階段,還推導出 standalone learned policy 的 goal-reaching probability 下界。
這點很關鍵。很多混合式訓練方法在訓練期間看起來很穩,但一旦把外掛支援拿掉,表現就掉下來。這篇論文試圖回答的就是:學到的新 policy,最後到底能不能自己站住?作者的答案是,在他們的假設下,可以,而且有形式上的保證。
實驗部分則是在 continuous-control benchmarks 上做評估。不過摘要沒有公開 benchmark 名稱,也沒有給出具體分數,所以這篇摘要沒有公開完整 benchmark 細節。能引用的只有結論方向:回報表現和競爭方法相當或更好,而且在訓練全程,包含最後沒有 baseline 支援的階段,goal-reaching rate 都維持在比較高的水準。
這個結果的重點不只是「有提升」,而是「交棒後還能維持」。對實務來說,這比訓練中某一段時間的高分更重要,因為真正上線時,你要的是獨立 policy,不是靠外部保護撐出來的暫時表現。
對開發者有什麼影響
如果你做的是 robotics、控制,或任何已經有可用 policy 的場景,這篇論文提供的是一種更務實的訓練路線。你不一定要從零開始,也不一定要把舊控制器當成一次性過渡品。
更具體地說,原本的 controller 可以變成訓練基礎設施。它不只是初始值,而是訓練期間的保險。這可能帶來幾個直接好處:前期更穩、探索風險更低、goal-reaching 表現比較不會大起大落。
對工程團隊來說,這種設計也改變了思考方式。問題不再是「怎麼立刻取代 baseline」,而是「怎麼安全地把責任移交」。這在那些 unsafe exploration 成本很高的系統裡,特別有價值。
不過,這篇摘要也留下不少實作上會在意的空白。它沒有說清楚仲裁規則怎麼設計、理論假設是什麼、baseline 的品質要多好才有用,也沒有交代 baseline 是怎麼來的。這些都會影響方法能不能重現,以及能不能移植到別的任務。
目前還看不到的限制
從摘要能確定的是方向,不是完整配方。沒有 benchmark 名稱,就很難判斷方法到底在什麼難度的任務上成立。沒有數字,就很難知道提升幅度有多大。沒有仲裁細節,就很難評估訓練成本和實作複雜度。
另外,摘要也沒有說 baseline 如果只是勉強可用,方法還會不會有效。這很重要,因為現實世界裡很多舊系統都不是「很棒但不夠好」,而是「只能湊合」。如果 baseline 太弱,這套 transfer 機制可能就不一定能穩定啟動。
所以這篇論文目前最穩的結論,不是它已經證明某個大幅 SOTA 提升,而是它提出了一個很清楚的訓練框架:先讓可用的基線保住任務,再把控制權慢慢交給學習策略,最後得到一個能獨立運作的模型。
總結
這篇工作把 RL 的起手式改寫了。不是從零硬學,而是先借用一個能用的 policy,讓訓練站在比較穩的地基上,再逐步完成接棒。理論上,它給出 goal-reaching 的保證;實驗上,它聲稱能維持較高的 goal-reaching rate,且最後的 learned policy 可以單獨運作。
對開發者來說,這種方法最大的價值不只是成績,而是流程更像真實工程:先保住可用性,再追求更好的控制。當你手上已經有一個不差的 baseline,這篇論文提供了一條比從頭訓練更實際的路。
- 把可用 baseline 當成訓練支架
- 透過仲裁機制逐步移交控制權
- 強調最後的 standalone policy 仍要能獨立站穩