A tighter theory for compressed distributed optimization
This paper tightens convergence theory for EF and EF21 in compressed distributed optimization.

This paper tightens convergence theory for EF and EF21 in compressed distributed optimization.
- Research org: Unspecified in arXiv abstract
- Core data: No benchmark numbers in abstract
- Breakthrough: Optimal step sizes and Lyapunov functions for EF and EF21
In distributed training, communication is often the bottleneck, not raw compute. If you have many workers or agents exchanging gradients, the cost of moving those updates around can slow everything down enough that compression becomes attractive. The catch is that compression usually hurts convergence, so the practical question is not just “can we compress?” but “can we compress without throwing away the guarantees that make optimization predictable?”
This paper focuses on that exact tradeoff for two well-known error-feedback methods: classic Error Feedback (EF) and Error Feedback 21 (EF21). The authors do not present a new application or a benchmark leaderboard. Instead, they aim to clean up the theory behind methods engineers already use when communication is expensive.
What problem this paper is trying to fix
Get the latest AI news in your inbox
Weekly picks of model releases, tools, and deep dives — no spam, unsubscribe anytime.
No spam. Unsubscribe at any time.
Distributed first-order optimization often relies on gradients being exchanged between agents. When those messages are large, communication becomes a bottleneck. A common workaround is to compress the gradient information before sending it, which reduces bandwidth but can weaken convergence guarantees.
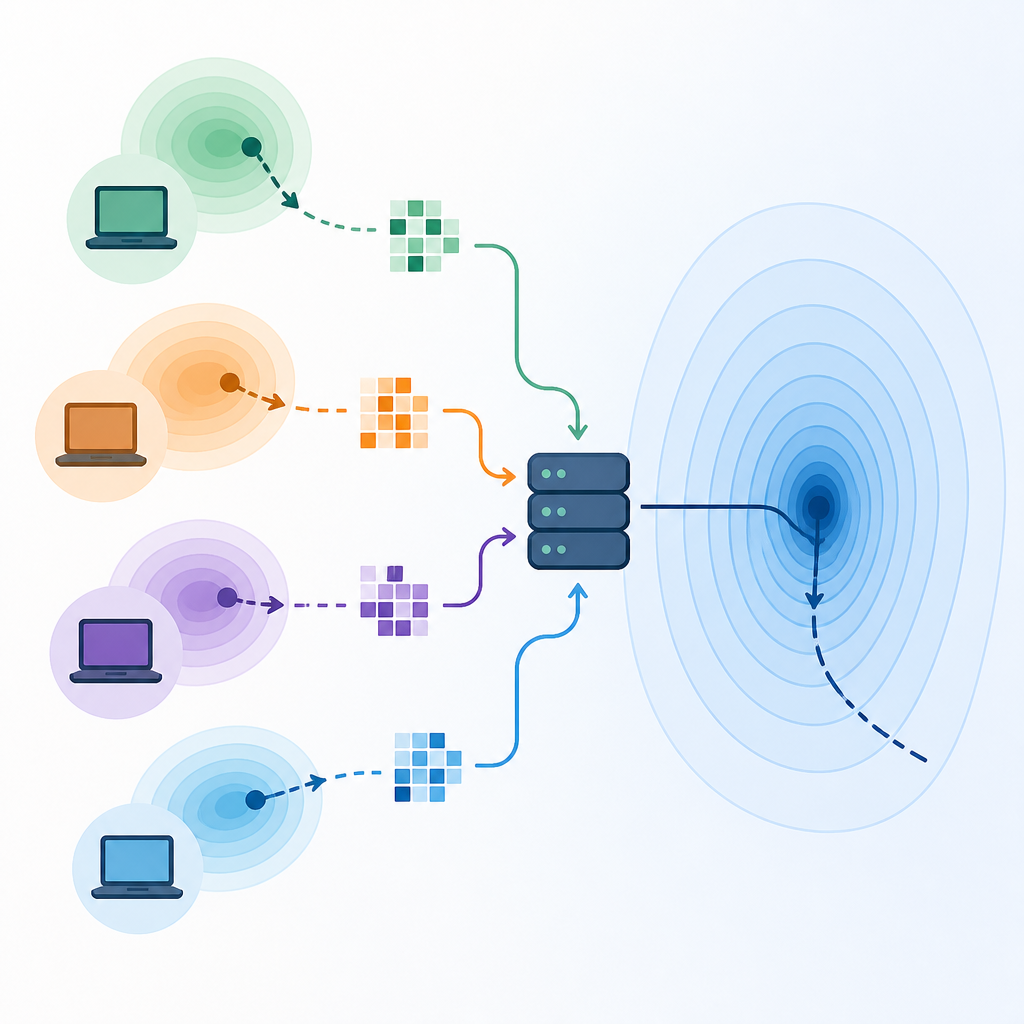
Error feedback is the standard repair mechanism. The basic idea is simple: if compression drops information, keep track of the error and feed it back into later updates so the lost signal is not gone forever. That makes the method computationally cheap and conceptually easy to bolt onto existing distributed optimization pipelines.
The problem is that the literature has proposed multiple error-feedback variants, and their relative behavior has been murky. For practitioners, that leaves a familiar gap: one method may look elegant on paper, but it is hard to know whether it is actually the best choice once you care about step sizes, convergence constants, and how the method behaves across different numbers of workers.
How the method works in plain English
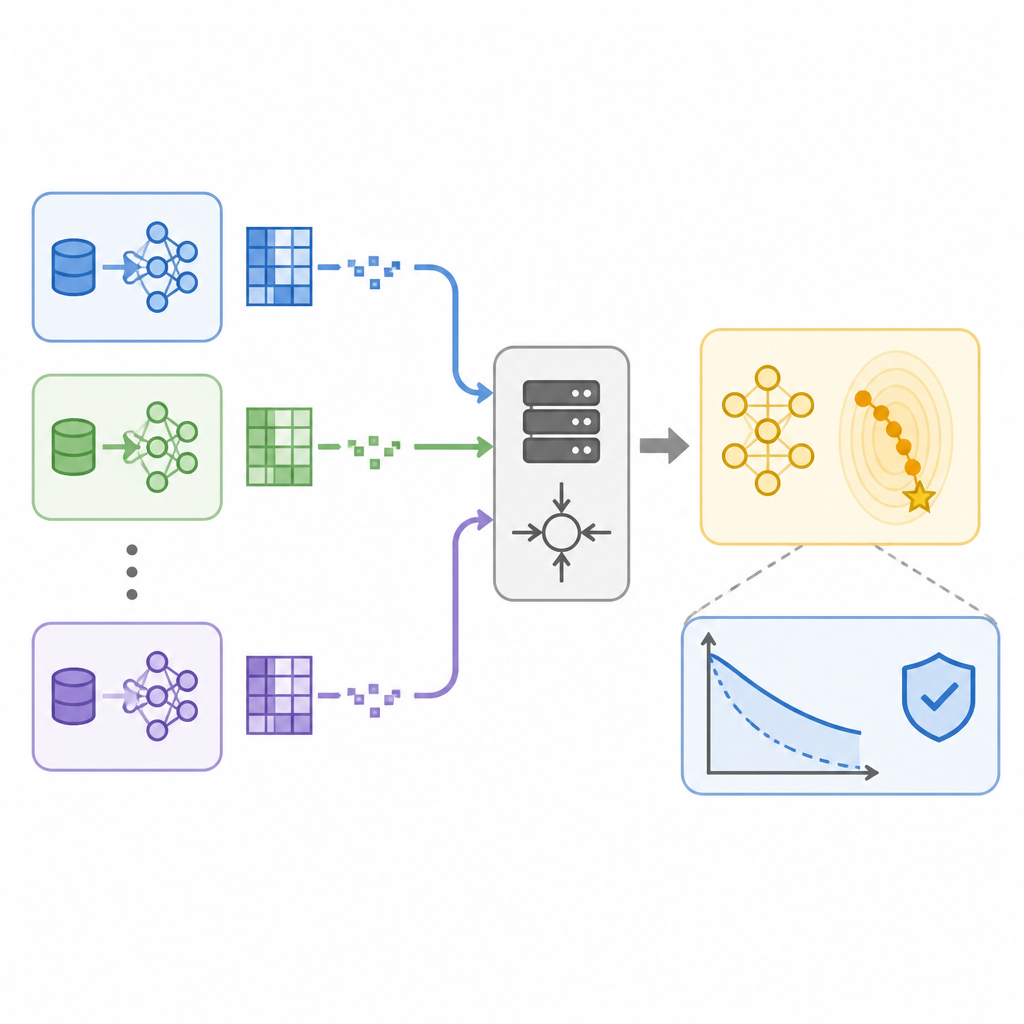
The paper studies two specific algorithms. EF is the classic error-feedback method. EF21 is a newer variant from the literature. Both aim to make compressed gradient exchange behave more like uncompressed optimization by correcting for what compression throws away.
What the authors do is not to change the algorithms themselves, but to analyze them more sharply. They identify optimal step-size choices and build optimal Lyapunov functions tailored to each method. In optimization theory, a Lyapunov function is the bookkeeping device that shows whether the method is making progress. A better Lyapunov function usually means a tighter, cleaner convergence proof.
That matters because convergence analysis is not just academic decoration. In distributed systems, a weak theoretical bound can hide bad scaling behavior or misleading assumptions. A tight analysis gives you a more reliable picture of how the algorithm should behave when you actually deploy it across multiple agents.
What the paper actually shows
The main result is a tight convergence analysis for EF and EF21. The authors say their results hold independently of the number of agents, which is important because many distributed methods look fine in small settings but become harder to reason about as the system grows.
They also recover the known best guarantees possible in the single-agent regime. That is a useful sanity check: the distributed analysis does not come at the cost of losing the strongest known behavior when the problem collapses to one worker.
One thing the abstract does not provide is benchmark numbers. There are no reported speedups, no wall-clock measurements, and no task-level accuracy tables in the source text provided here. So the contribution should be read as a theoretical sharpening of the convergence story, not as an empirical claim about winning on a benchmark suite.
That distinction is important. If you are comparing compressed optimization methods in a production or research setting, the paper gives you a stronger mathematical basis for choosing between EF and EF21, but it does not tell you how they perform on a specific model, dataset, or hardware stack.
Why engineers should care
If you build distributed training systems, the paper speaks directly to a common engineering constraint: communication is expensive, and compression is tempting. Error feedback is one of the simplest ways to make compression usable, so understanding its limits matters when you are tuning training loops, designing worker-to-worker protocols, or deciding whether to compress gradients at all.
The practical value here is confidence. A tight theory can tell you which step sizes are actually justified and whether a method’s behavior is robust to the number of agents. That is especially relevant if you are trying to reason about scaling, because distributed optimization often fails in the messy middle between elegant theory and real cluster behavior.
The paper also helps narrow the choice set. Instead of treating all error-feedback variants as interchangeable, it gives a more precise comparison between EF and EF21. For teams maintaining optimization libraries or distributed ML infrastructure, that kind of clarity can reduce guesswork when selecting a default method.
What this does not settle
This paper is about theory, not a full systems evaluation. It does not claim new compression operators, new distributed architectures, or new benchmark wins. It also does not, based on the abstract alone, say which method is better in every practical setting. The authors improve understanding of EF and EF21, but they do not claim to have solved every open question around compressed distributed learning.
There is also a broader limitation baked into this area: a tight convergence proof still depends on the assumptions of the optimization model. Real-world distributed training can involve non-ideal network behavior, heterogeneous clients, changing data distributions, and implementation details that do not show up in an abstract.
Still, that does not make the result minor. In a field where communication bottlenecks force engineers to trade off bandwidth against optimization quality, tighter theory is a real asset. It helps distinguish methods that merely work in practice from methods that are also well understood.
Bottom line
This paper gives a cleaner mathematical account of two core error-feedback algorithms used to make compressed distributed optimization work better. The headline is not a flashy benchmark; it is a tighter convergence story with optimal step sizes and tailored Lyapunov functions. If you care about distributed learning systems, that is the kind of result that can quietly shape how you design and tune real training pipelines.
- Communication bottlenecks are the core problem this paper addresses.
- EF and EF21 get tight convergence analyses with optimal step sizes.
- The paper is theoretical: the abstract includes no benchmark numbers.
// Related Articles
- [RSCH]
CRDTs keep replicas in sync without locks
- [RSCH]
Post-Deterministic Systems for Autonomous Infra
- [RSCH]
Causal methods for measuring task learnability
- [RSCH]
RL Training That Hands Off Control Gradually
- [RSCH]
OmniGameArena benchmarks VLM game agents better
- [RSCH]
TurboQuant cuts KV cache memory 6x in Google tests